







































































-247x247.jpg)






























-247x247.jpg)


















































































































































































—Front-View-247x247.jpg)
—illustration-1-247x247.jpg)
—Top-View-247x247.jpg)































































































































-247x247.jpg)




Lo sciame di mini droni esplora un edificio senza controllo centrale, GPS, mappatura o memoria.
Sciami di droni con risorse limitate possono effettivamente cercare un ambiente, secondo la Technical University of Delft, che ha inventato un algoritmo per farlo funzionare, senza la guida di un computer centrale.
L’obiettivo generale del progetto era di fare in modo che un gruppo di piccoli robot si espandesse autonomamente dopo il loro rilascio, fare video il più possibile di un ambiente sconosciuto, per poi tornare a una base centrale con immagini per successive analisi.
Mandare in missione piccoli robot, renderli sicuri attorno alle persone, escludere processori di bordo che consumano troppo e quindi tecniche di navigazione avanzate come SLAM (simultaneous localisation and mapping) basato su telecamere.
“La più grande sfida nel raggiungere l’esplorazione con gli sciami è a livello dell’intelligenza individuale dei droni”, ha affermato la ricercatrice Kimberly McGuire. “All’inizio del progetto, ci siamo concentrati sul raggiungimento delle capacità di volo di base come il controllo della velocità ed evitare gli ostacoli. Successivamente, abbiamo progettato un metodo per i piccoli droni per rilevare ed evitarsi a vicenda.”
Per dare ad ogni drone un’idea della vicinanza dei suoi vicini, ed evitare collisioni, un ricetrasmettitore a bordo da 2,4 GHz su ciascuno era usato per monitorare la potenza del segnale tra le coppie.

Delft ha usato i droni Crazyflie 2.0 estremamente potenti di Bitcraze nel suo sciame. Tutti i processi di elaborazione dovevano essere ridotti alla capacità di riserva dell’MCU STM32F4.
L’algoritmo è lo “swarm gradient bug algorithm” (SGBA), che massimizza l’area coperta facendo in modo che i robot viaggino in diverse direzioni lontano dal punto di partenza, mentre seguono i muri ed evitano oggetti mentre si muovono, secondo il documento ‘Soluzione di navigazione minima per uno sciame di piccoli robot volanti per esplorare un ambiente sconosciuto’, che descrive il lavoro di Science Robotics.
Algoritmi di bug
Gli algoritmi di bug sono una classe di algoritmi che reagiscono agli oggetti appena entrano nel raggio del sensore.
Gli “algoritmi di bug”, ha spiegato McGuire, “non creano mappe dell’ambiente ma affrontano ostacoli al volo. In linea di principio, le mappe dettagliate sono molto convenienti, poiché consentono a un robot di navigare da qualsiasi punto della mappa a qualsiasi altro punto, lungo un percorso ottimale. Tuttavia, i costi per realizzare una simile mappa su piccoli robot sono proibitivi. L’algoritmo di bug proposto porta a percorsi meno efficienti ma ha il vantaggio che può anche essere implementato su piccoli robot.”
Per diffonderli fin dall’inizio, ogni robot è stato programmato con la propria direzione di marcia preferita che differisce dagli altri nello sciame.
Una volta in movimento, i droni si dirigono nella loro direzione preferita, navigando analizzando le immagini sequenziali da una telecamera rivolta verso il basso (“odometria visiva”) che viene modificata seguendo il muro usando un laser (sì, quelle Crazyflies includono il raggio laser). La portata laser viene anche utilizzata per evitare oggetti statici.
Vista camera da fotocamera
A seguito di un segnale di batteria quasi scarica, i robot tornano alla base dove è possibile visualizzare le immagini della telecamera memorizzate. La navigazione di ritorno avviene mediante il segnale di un radiofaro (2,4 GHz) situato alla base nominale e il monitoraggio lungo il gradiente del segnale.
La ricerca e il salvataggio efficaci sono l’obiettivo generale del progetto, che comprende anche l’Università di Liverpool e l’Università Radboud di Nimega, e ha finanziamenti dal programma di intelligenza artificiale della Fondazione nazionale olandese per la scienza.
Vista da fotocamera drone

“Sciami di robot piccoli ed economici sarebbero in grado di eseguire attività che sono attualmente fuori dalla portata di grandi robot individuali. Ad esempio, uno sciame di piccoli droni volanti sarebbe in grado di esplorare un sito di disastri molto più rapidamente di un singolo drone più grande. Tali sciami non sono ancora stati realizzati”, secondo TU Delft.
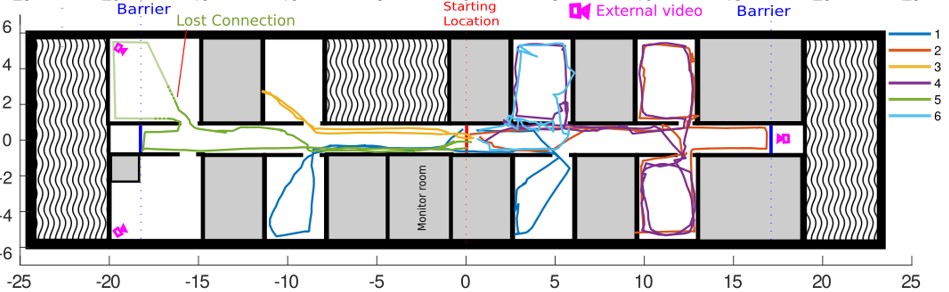
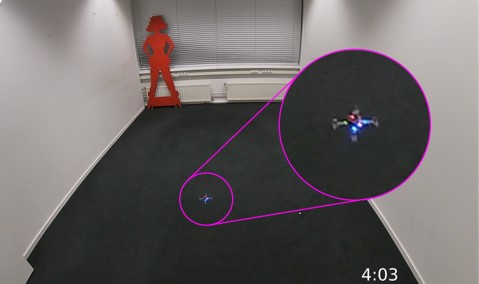
In una situazione di ricerca e salvataggio simulata come prova di concetto, lo sciame è stato introdotto in un edificio all’interno del quale erano stati lasciati due manichini (diagramma a destra e foto “vittima” più sopra).
Entro sei minuti, i sei droni avevano esplorato circa l’80% delle stanze aperte e trovato entrambe le “vittime”. “Lo sciame si è rivelato utile per la ridondanza”, secondo TU Delft. Poiché “un drone ha trovato una vittima, ma a causa di un guasto hardware della fotocamera, non è stato in grado di riportare immagini. Fortunatamente, anche un altro drone ha catturato la vittima sulla sua fotocamera”.
Questo video merita di essere visto, così come il documento di Science Robotics che è estremamente chiaro e copre un sacco di terreno omesso sopra, tra cui una sezione sull’autonomia dello sciame all’avanguardia.